System Overview
The PlusTime actuator concept is based on a mechanically coordinated system designed to produce controlled linear/rotary motion while managing load behaviour during engagement and release events.
Core Architecture
The system combines rotational actuation with a translating mechanical interface, enabling controlled axial movement without continuous rotation of the output element.
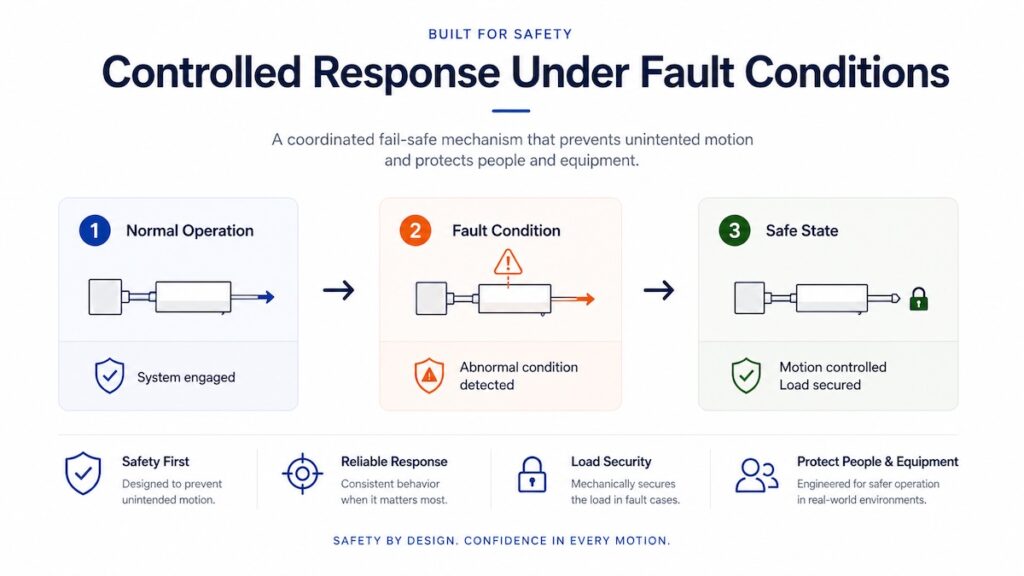
Integrated release mechanisms are designed to manage disengagement under load, supporting controlled motion during both normal operation and fault conditions.
Key Engineering Concepts
Coordinated mechanical release under load
Controlled transition between engaged and disengaged states
Separation of actuation and release functions
Predictable motion behavior during failure scenarios
Design Focus
Development efforts are focused on achieving reliable mechanical behaviour through controlled timing, load management, and repeatable engagement characteristics.
Particular attention is given to minimizing unintended motion during release events and ensuring consistent system response across varying operating conditions.
Development Status
The system is currently in early-stage development, with ongoing work focused on conceptual validation, modelling, and evaluation of key mechanical behaviours.
Interested in Learning More?
We welcome discussions with investors, technical partners, and industry stakeholders interested in controlled motion systems.